OpenCV 4.5 simple optical flow GPU tutorial cuda::FarnebackOpticalFlow
This OpenCV tutorial is a very simple code example of GPU Cuda optical flow in OpenCV written in c++. The configuration of the project, code, and explanation are included for farneback Optical Flow method. Farneback algorithm is a dense method that is used to process all the pixels in the given image. The dense methods are slower but more accurate as all the pixels of the image are processed. In the following example, I am displaying just a few pixes based on a grid. I am not displaying all the pixes. In the opposite to dense method the sparse method like Lucas Kanade using just a selected subset of pixels. They are faster. Both methods have specific applications. Lucas-Kanade is widely used in tracking. The farneback can be used for the analysis of more complex movement in image scene and furder segmentation based on these changes. As dense methods are slightly slower, the GPU and Cuda implementation can lead to great performance improvements to calculate optical flow for all pixels of your image.

Content cuda::FarnebackOpticalFlow tutorial
- Requirements to compile and run code
- Brief description of how to compile OpenCV with Cuda
- Visual Studio Opencv Cuda Project configuration
- FarnebackOpticalFlow
- Brief description of code
- Full code
Prerequisities cuda::FarnebackOpticalFlow
- NVIDIA CUDA Toolkit I am using version 11
- Visual Studio 2019
- Opencv 4.5 build from source with Cuda
Build OpenCV with Cuda contrib
The tutorial to compile Opencv with Cuda and contribution library is here. You can exclude GStreamer.
Visual studio OpenCV Cuda configuration
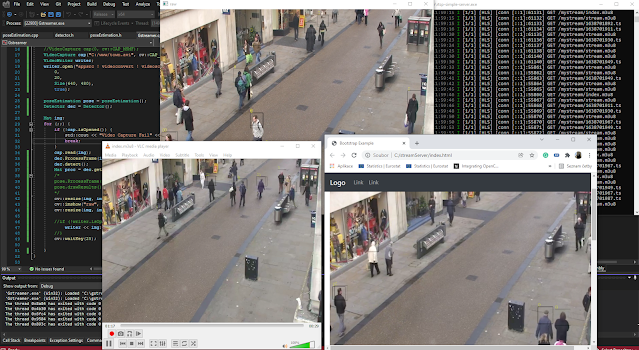
The following examples show the exact setting for the Visual Studio project. Additionally to normal OpenCV configuration. You have to point to a few locations. Include directory ....CUDA\v11.0\include and additional library dependencies ....CUDA\v11.0\x64. The last thing is to add OpenCV Cuda specific libs to additional dependencies. Just follow these pictures:
 |
Visual studio include directory OpenCV Cuda |
 |
Visual studio additional library directories OpenCV Cuda |
 |
Visual studio additional dependencies OpenCV Cuda |
cuda::FarnebackOpticalFlow class
The use of FarnebackOpticalFlow with default parameters is very simple and straightforward. The first step is the create a pointer to the FarnebackOpticalFlow object. The Ptr in OpenCV is C++11 shared pointer. I believe that the most important advantage of this pointer to mention is automatic cleanup.
Ptr<cuda::FarnebackOpticalFlow> farn = cuda::FarnebackOpticalFlow::create();
The actual calculation of the optical flow is done in this calc function. The first parameter is GPU mat GpuImg0 for the previous image, the second GpuImg1 is for the actual image and the flow is GpuMat, where to put the result. The calculated optical flow based on the difference between GpuImg0 and GpuImg1; farn->calc(GpuImg0, GpuImg1, gflow);
A short explanation of OpenCV optical flow code
The flow is simple. You have to capture at least two images to calculate flow. The first run of the for the look just fills the previous image frame1.
If frame1 exists just calculate the flow and update the frame1 at the end of the loop.
There is a few simple tricks in the code.
1) The image must be gray
2) Create GpuMat from Mat
3) Put the result from gflow GpuMat to Mat flow.
gflow.download(flow);
4) Draw the results.
You can draw optical flow for each pixel. The original image will be lost. This is why, The x,y iterates on y +=+10 grid. The origin x,y and end point is x+Point2f x and y from the matrix flow. The * 5 is the gain to amplify the size of the flow line.
FarnebackOpticalFlow tutorial code C++